PRT - Portable Robotics Telescope
My
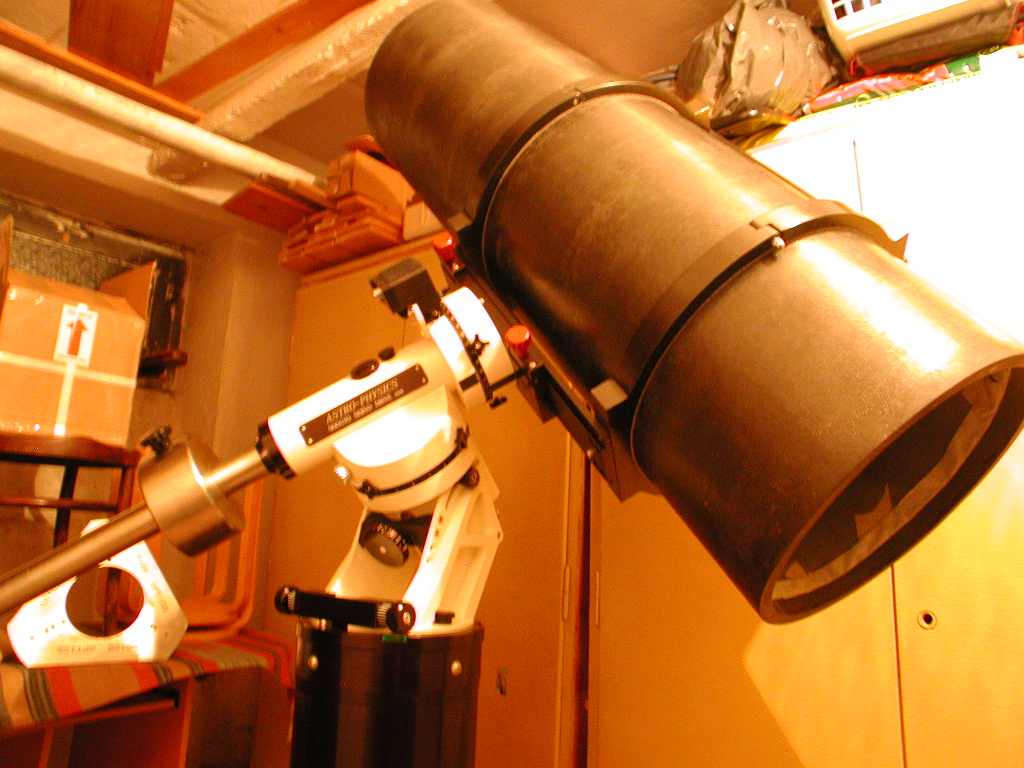
Portable Robotics Telescope
is based on Monolith - a solid, beautiful and portable pier from
Particle
Wave Technologies, an
excellent
AP-900 GTO German equatorial mount from Astro-Physics, now upgraded
with new GTO3, the Polar Fork Assembly and Heavy-Duty
Azimuth Adjuster. The main
parabolic
300
mm/f4 SPX mirror is from Orion
Optics, UK. The tube
from Dream Scopes is simply fantastic, see here.
My
auxiliary scope is a Megrez
80/f6
SD refractor from Williams
Optics and as the main CCD camera
I curently use the ST-1603XME from
SBIG. Focusing is done via a 2"
Feather
Touch
Focuser and RoboFocus. The
whole system runs on Linux.
My
current setup under construction.
My first setup, the tube is in the trash now.










